ABOUT¶



Project Overview¶


AutoDRIVE is envisioned to be an integrated platform for autonomous driving research and education. It bridges the gap between software simulation and hardware deployment by providing the AutoDRIVE Simulator and AutoDRIVE Testbed, a well-suited duo for sim2real applications. It also offers AutoDRIVE Devkit, a developer's kit for rapid and flexible development of autonomy algorithms. Although the platform is primarily targeted towards autonomous driving, it also supports the development of smart-city solutions for managing the traffic flow.
AutoDRIVE Testbed¶
 |
 |
|---|---|
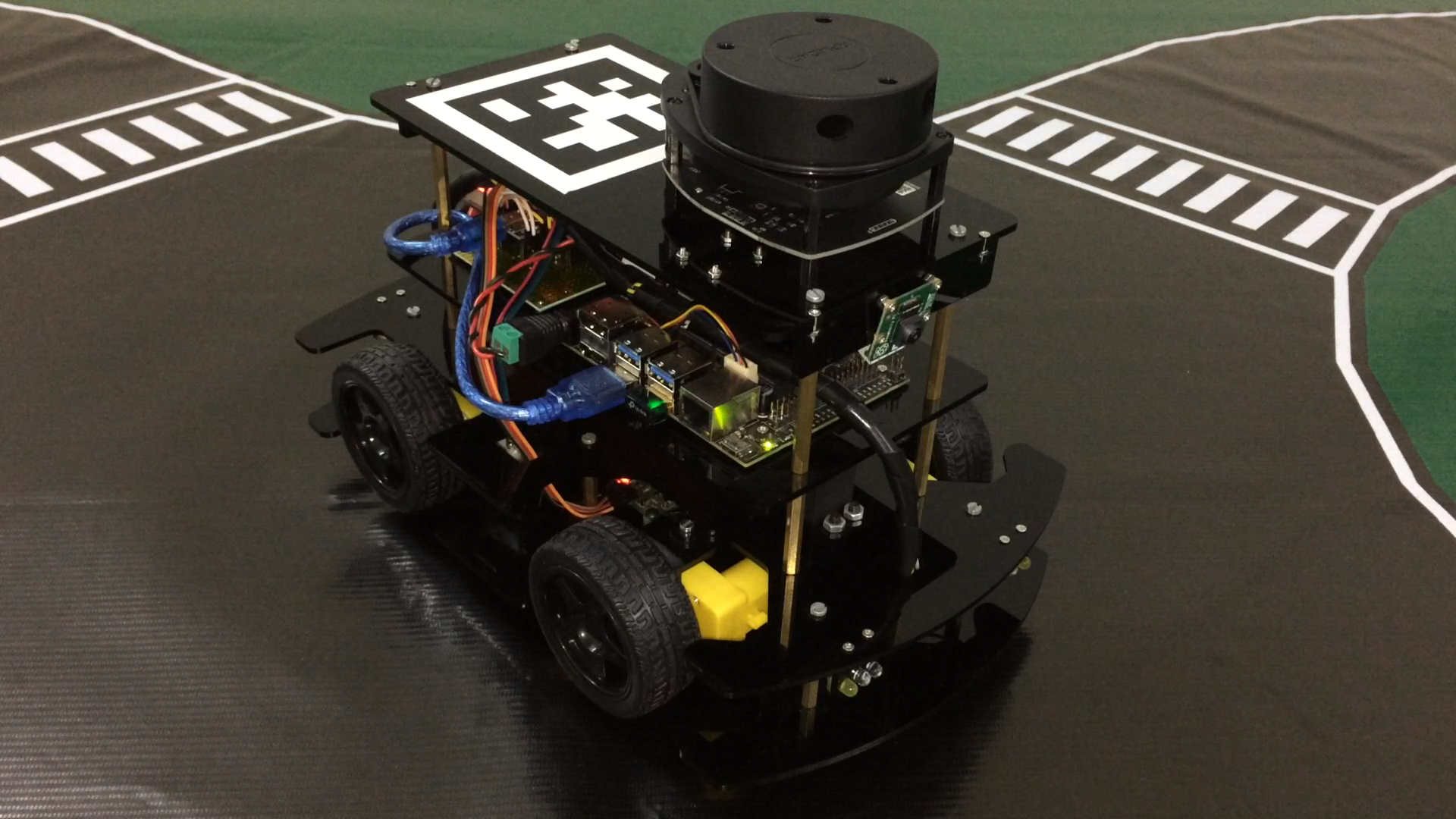
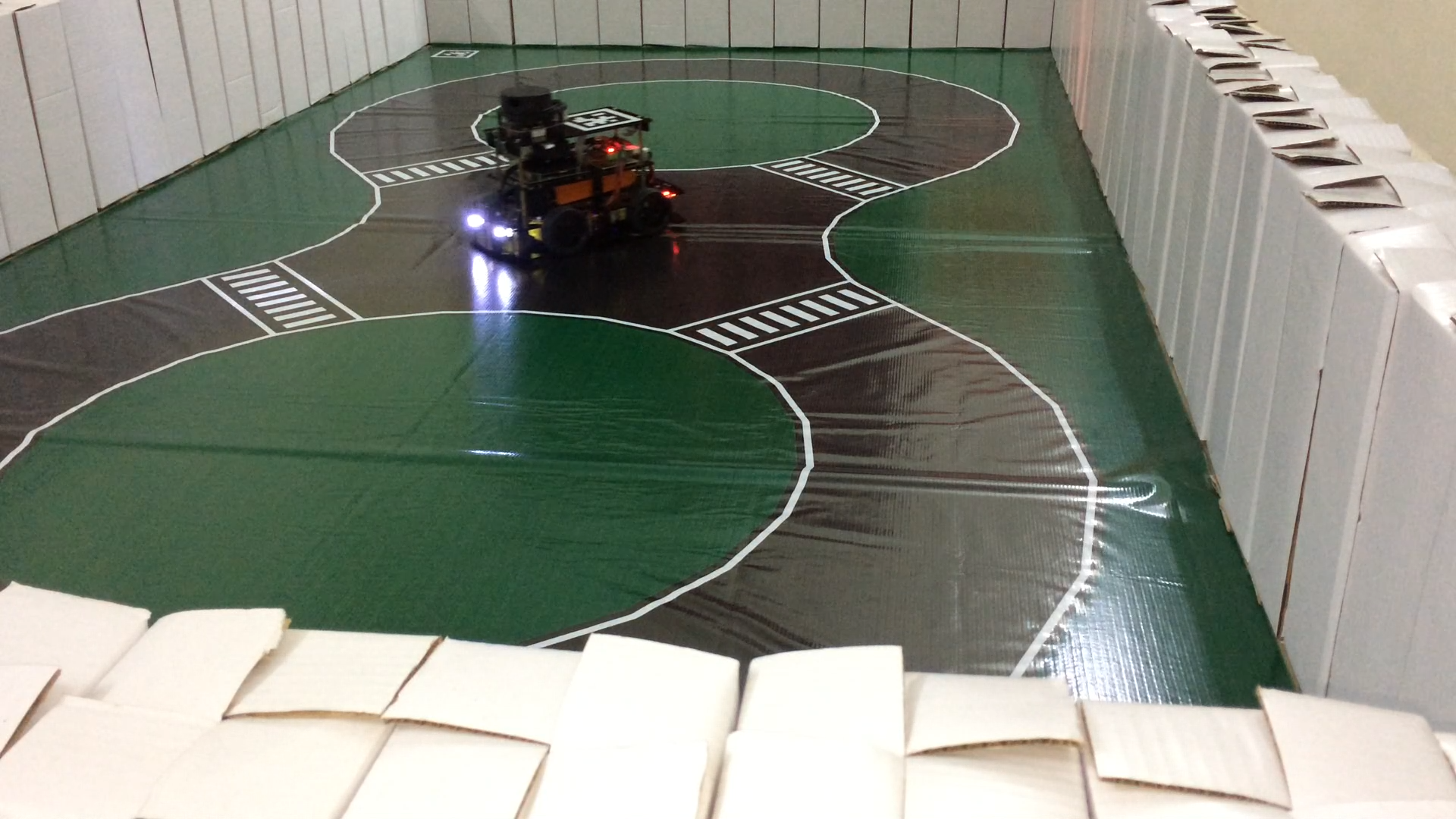
| Vehicle | Infrastructure |
AutoDRIVE Testbed is the hardware setup comprising of a scaled vehicle model (called Nigel) and a modular infrastructure development kit. The vehicle is equipped with a comprehensive sensor suite for redundant perception, a set of actuators for constrained motion control and a fully functional lighting system for illumination and signaling. It can be teleoperated (in manual mode) or self-driven (in autonomous mode). The infrastructure development kit comprises of various environment modules along with active and passive traffic elements.
- Source Branch: AutoDRIVE Testbed
- Latest Release: AutoDRIVE Testbed 0.2.0
- Upcoming Release: AutoDRIVE Testbed 0.3.0 is currently under development.
- Nigel (AS) Build Documentation: Assembly Guide, Assembly Animation and BOM
- Nigel (4WD4WS) Build Documentation: Assembly Guide, Assembly Animation and BOM
AutoDRIVE Simulator¶
 |
 |
|---|---|
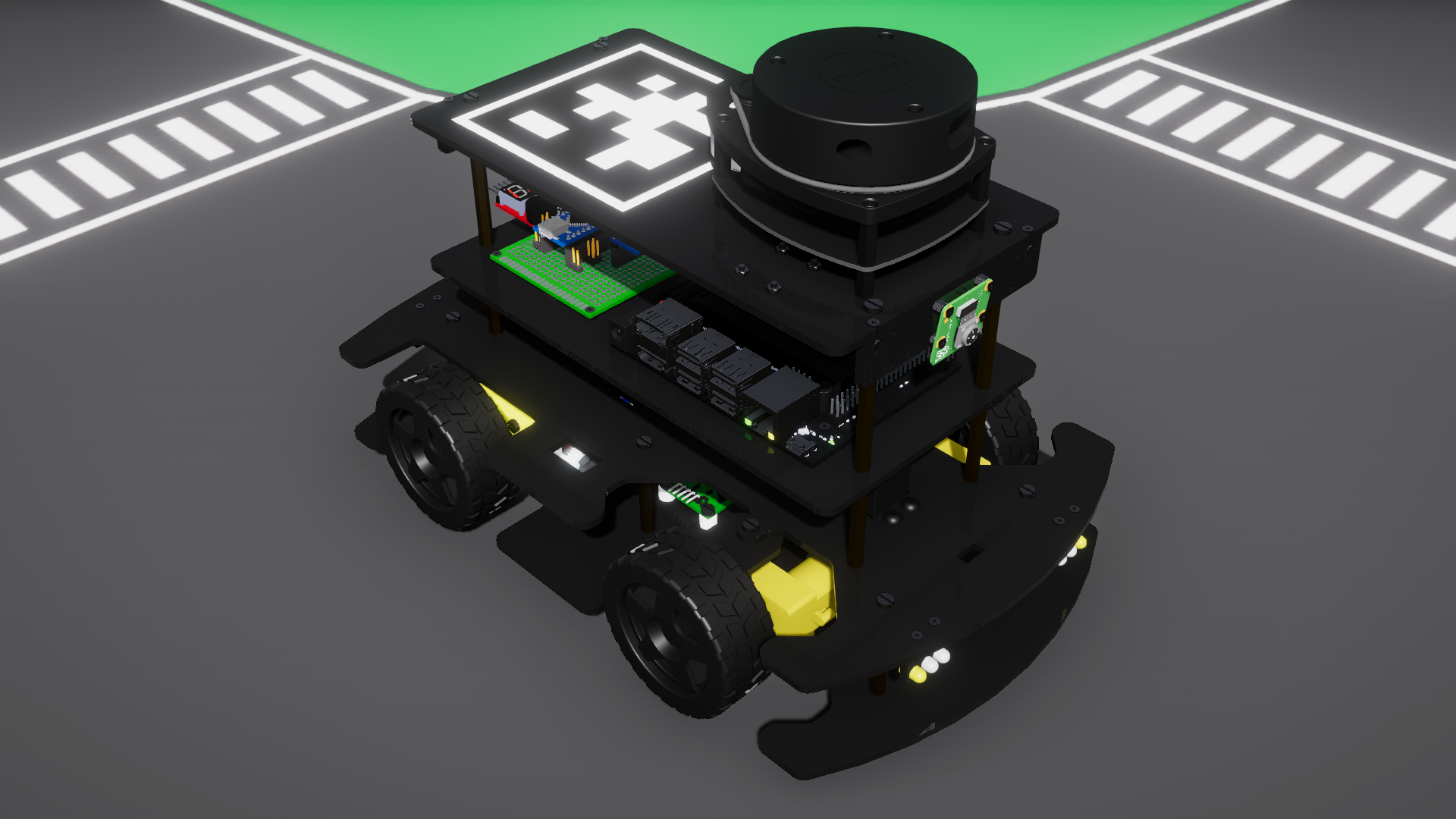
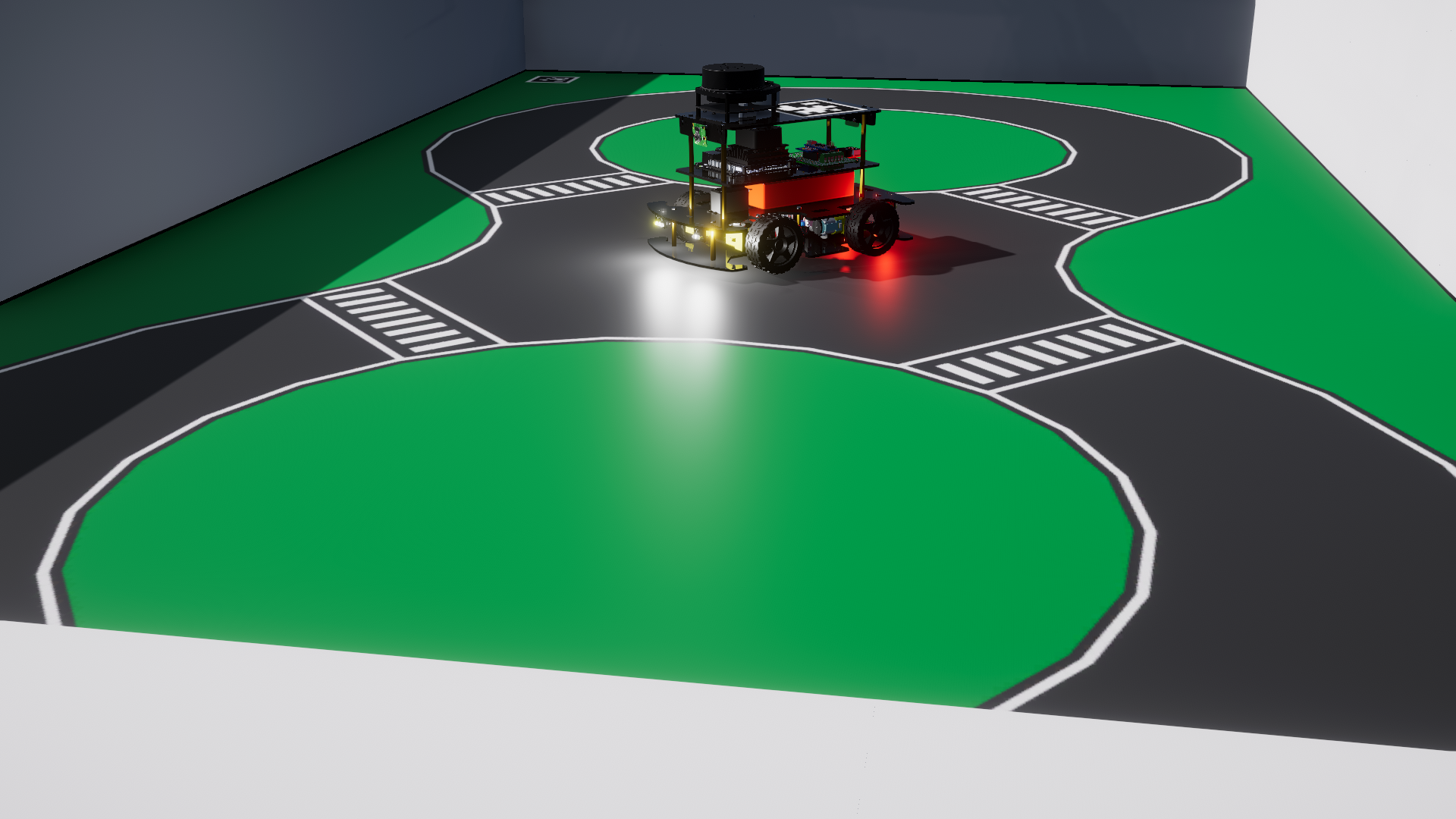
| Vehicle | Infrastructure |
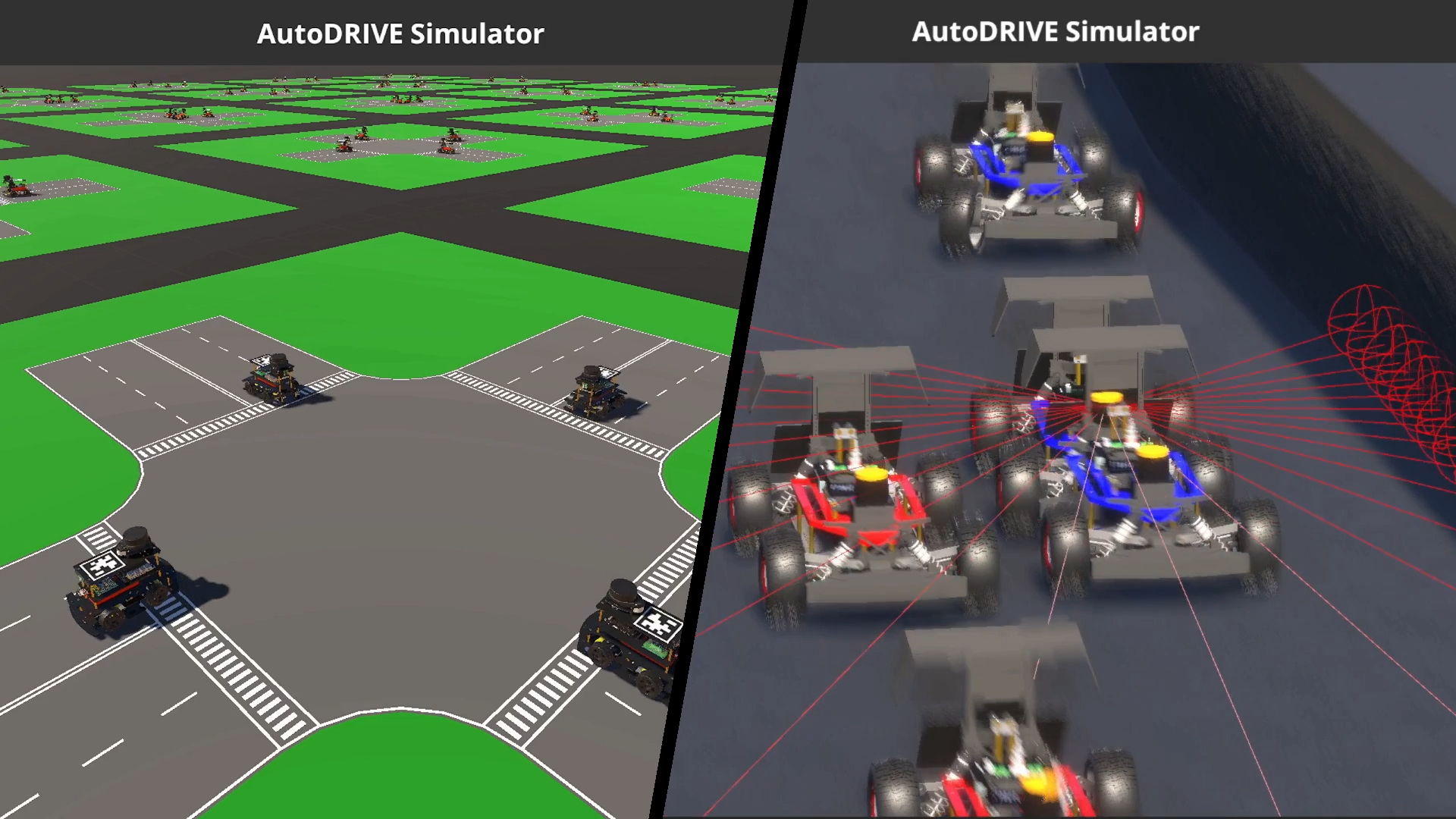
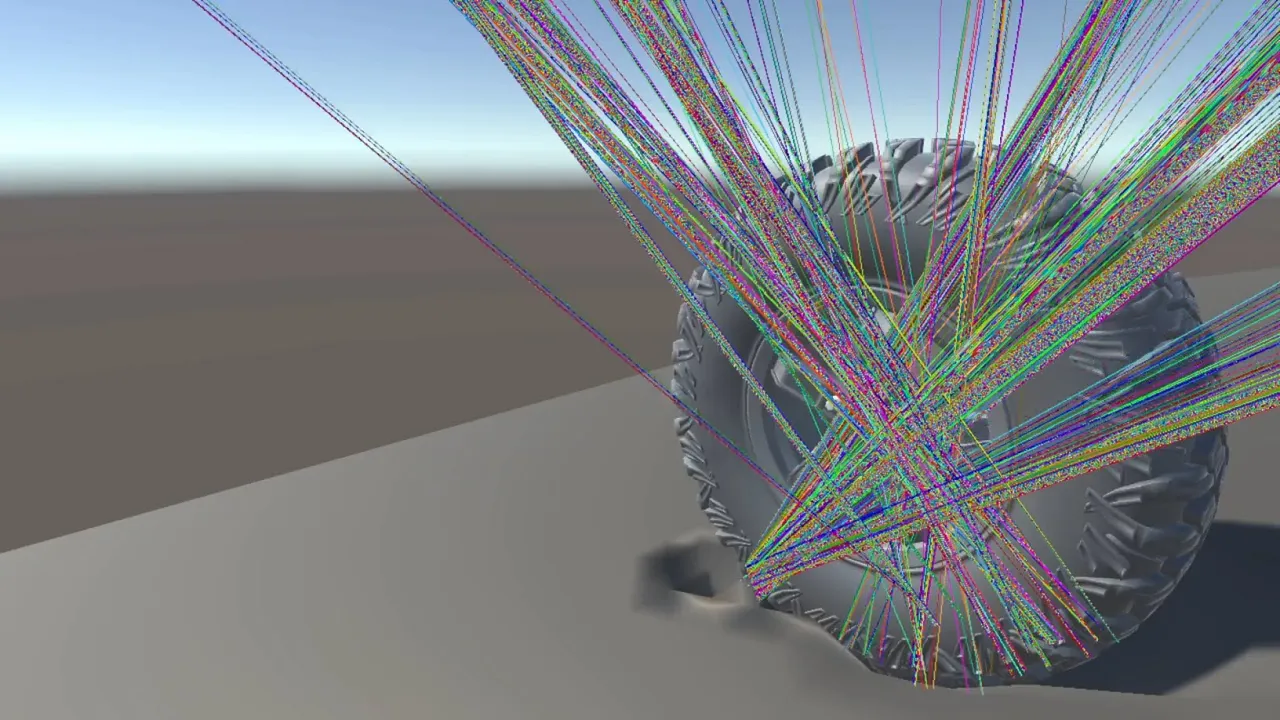
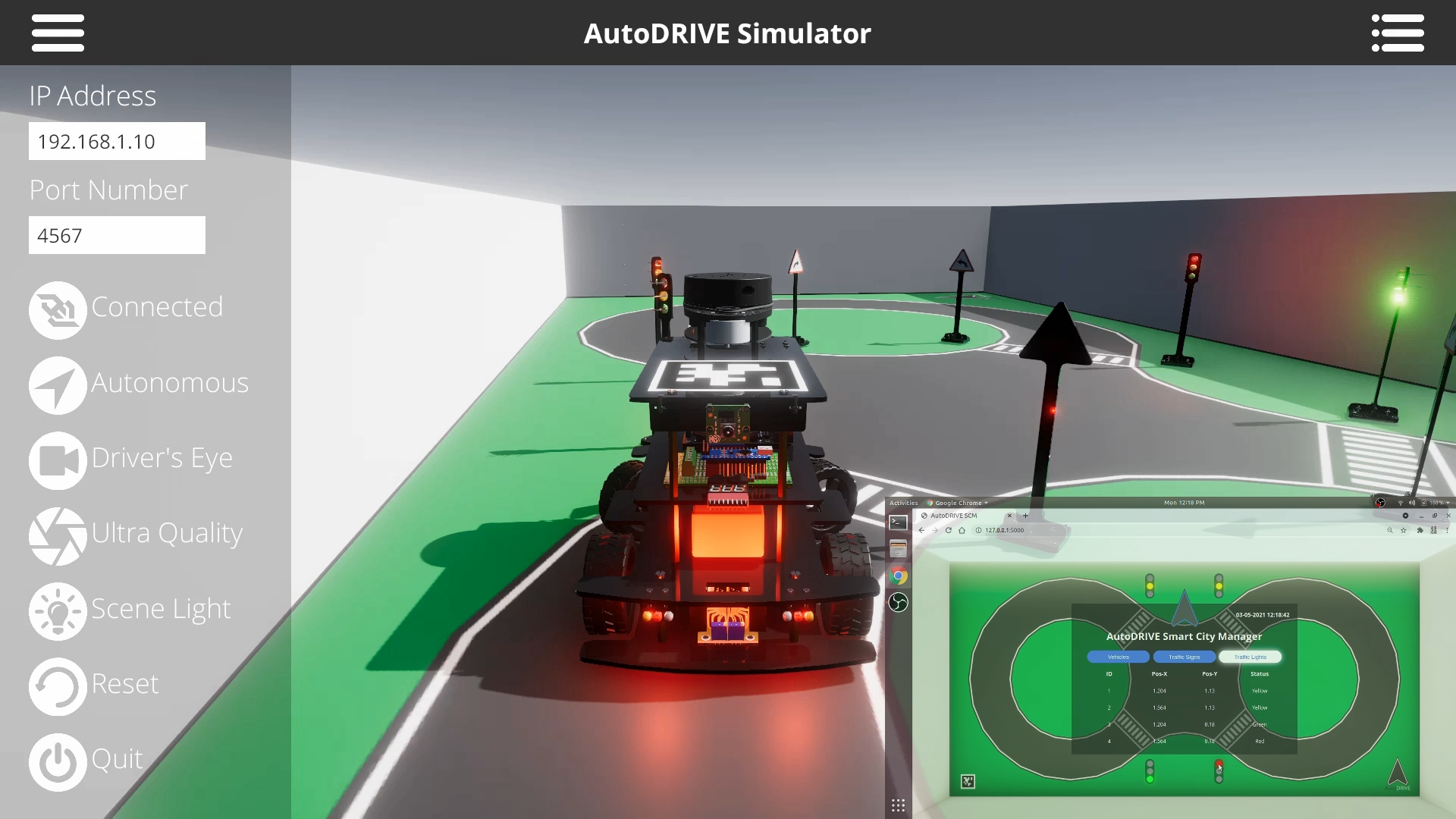
AutoDRIVE Simulator is the digital twin of the AutoDRIVE Testbed, which enables the users to virtually prototype their algorithms either due to hardware limitations or as a part of the reiterative development cycle. It is developed atop the Unity game engine and offers a WebSocket interface for bilateral communication with the autonomy algorithms developed independently using the AutoDRIVE Devkit. The standalone simulator application is targeted at Full HD resolution (1920x1080p) with cross-platform support (Windows, macOS and Linux). It is a light-weight software application that utilizes system resources wisely. This enables deployment of the simulator application and autonomy algorithms on a single machine; nonetheless, distributed computing is also supported.
- Source Branch: AutoDRIVE Simulator
- Latest Release: AutoDRIVE Simulator 0.3.0
- Upcoming Release: AutoDRIVE Simulator 0.4.0 is currently under development.
AutoDRIVE Devkit¶
 |
 |
|---|---|
| ADSS Toolkit | SCSS Toolkit |
AutoDRIVE Devkit is a developer's kit that enables the users to exploit AutoDRIVE Simulator or AutoDRIVE Testbed for rapid and flexible development of autonomy algorithms pertaining to autonomous driving (using ADSS Toolkit) as well as smart city management (using SCSS Toolkit). It supports local (decentralized) as well as distributed (centralized) computing and is compatible with Robot Operating System (ROS), while also offering a direct scripting support for Python and C++.
- Source Branch: AutoDRIVE Devkit
- Latest Release: AutoDRIVE Devkit 0.3.0
- Upcoming Release: AutoDRIVE Devkit 0.4.0 is currently under development.
Awards and Recognition¶
- Best Paper Award Candidate for paper "A Systematic Digital Engineering Approach to Verification & Validation of Autonomous Ground Vehicles in Off-Road Environments" by ASME Automotive and Transportation Systems Technical Committee (ATS TC) at MECC 2025
- Best Poster Award for project "Digital Twins in the Cloud: A Modular, Scalable and Interoperable Framework for Accelerating Verification and Validation of Autonomous Driving Solutions" at High Performance Computing (HPC) Day 2025
- Best Poster Award for project "Off-Road Autonomy Validation Using Scalable Digital Twin Simulations Within High-Performance Computing Clusters" at High Performance Computing (HPC) Day 2025
- Lightning Talk of project "Autonomy-Oriented Digital Twins in the Cloud" at High Performance Computing (HPC) Day 2025
- Finalist Award for project "Nigel: A Mechatronically Redundant and Reconfigurable Scaled Autonomous Vehicle of AutoDRIVE Ecosystem" at ASME Student Mechanism and Robot Design Competition (SMRDC) 2023
- Best Paper Award for paper "AutoDRIVE Simulator: A Simulator for Scaled Autonomous Vehicle Research and Education" at CCRIS 2021
- Best Project Award for "AutoDRIVE – An Integrated Platform for Autonomous Driving Research and Education" at National Level IEEE Project Competition 2021
- Best Project Award for project "AutoDRIVE – An Integrated Platform for Autonomous Driving Research and Education" at SRMIST Mechatronics Department 2021
- Gold Medal for paper "AutoDRIVE – An Integrated Platform for Autonomous Driving Research and Education" at SRMIST Research Day 2021
- Lightning Talk of project "AutoDRIVE Simulator: A Simulator for Scaled Autonomous Vehicle Research and Education" at ROS World 2020
- India Connect @ NTU Research Fellowship 2020 for project "AutoDRIVE Simulator"
Resources¶
Highlights¶
We encourage you to take a look at the following quick highlights to keep up with the recent advances in AutoDRIVE Ecosystem.
 |
| AutoDRIVE Ecosystem Pitch Video |







Demonstrations¶
We encourage you to take a look at the following research projects developed using the AutoDRIVE Ecosystem.
 |
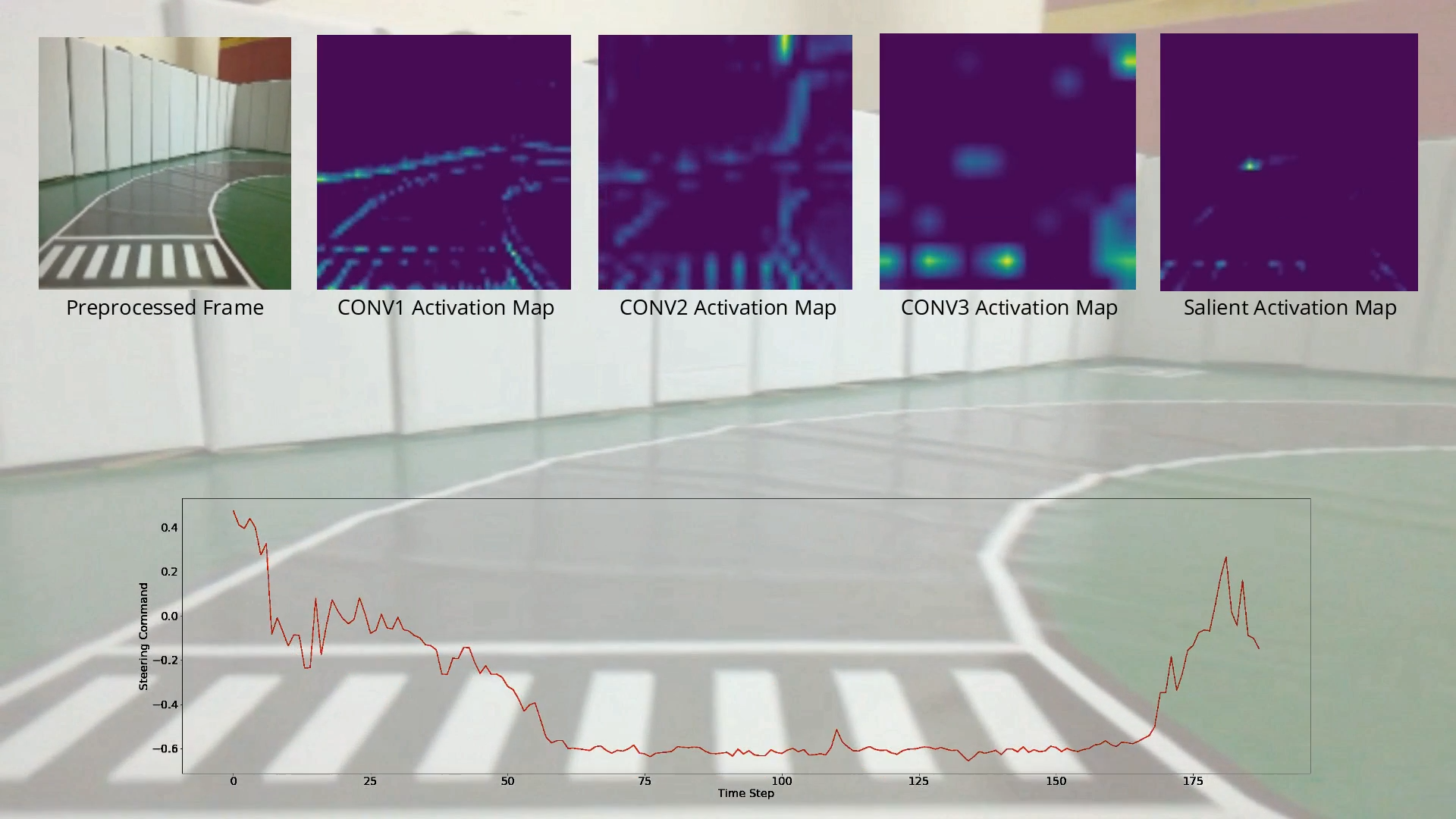 |
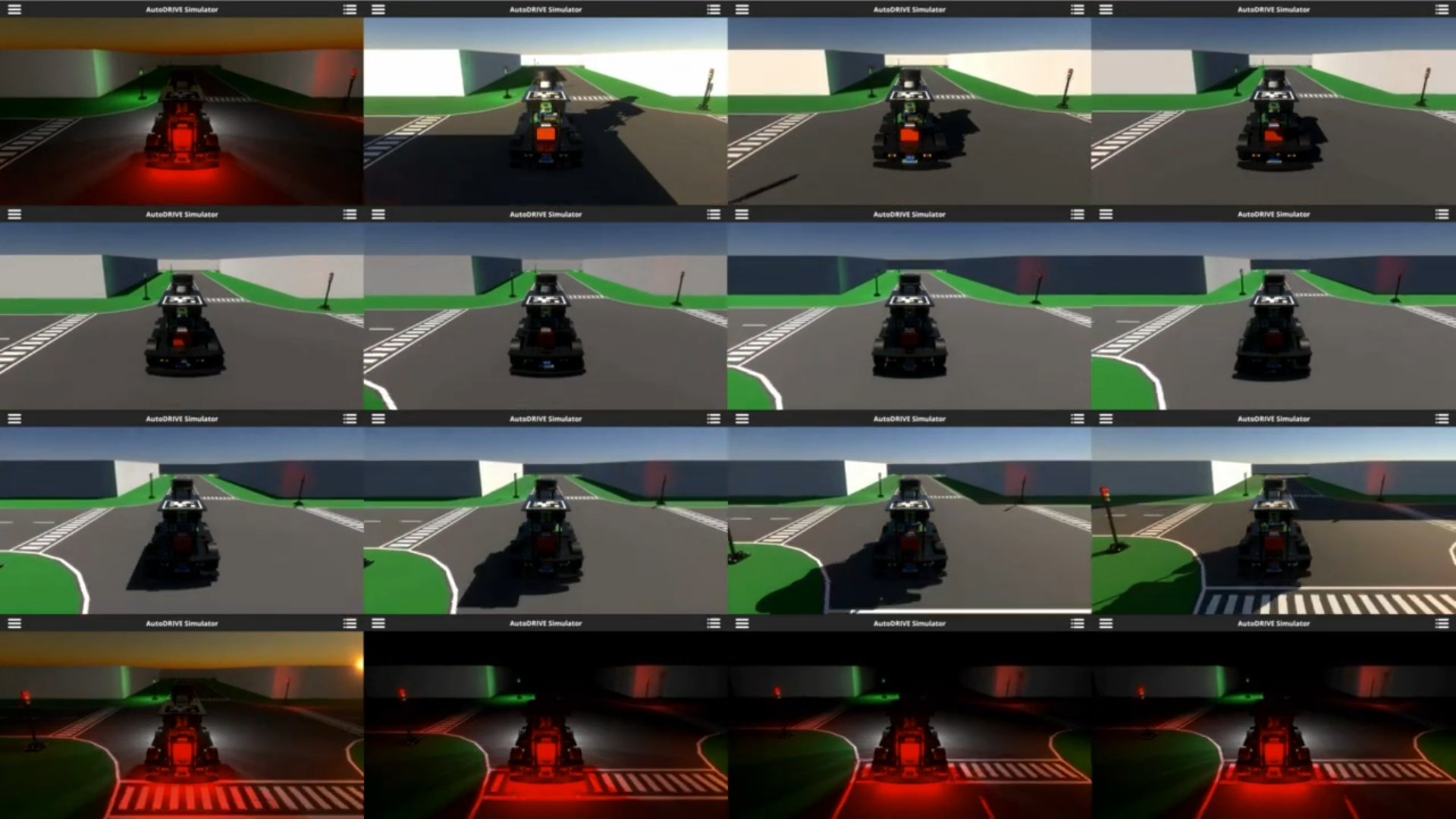
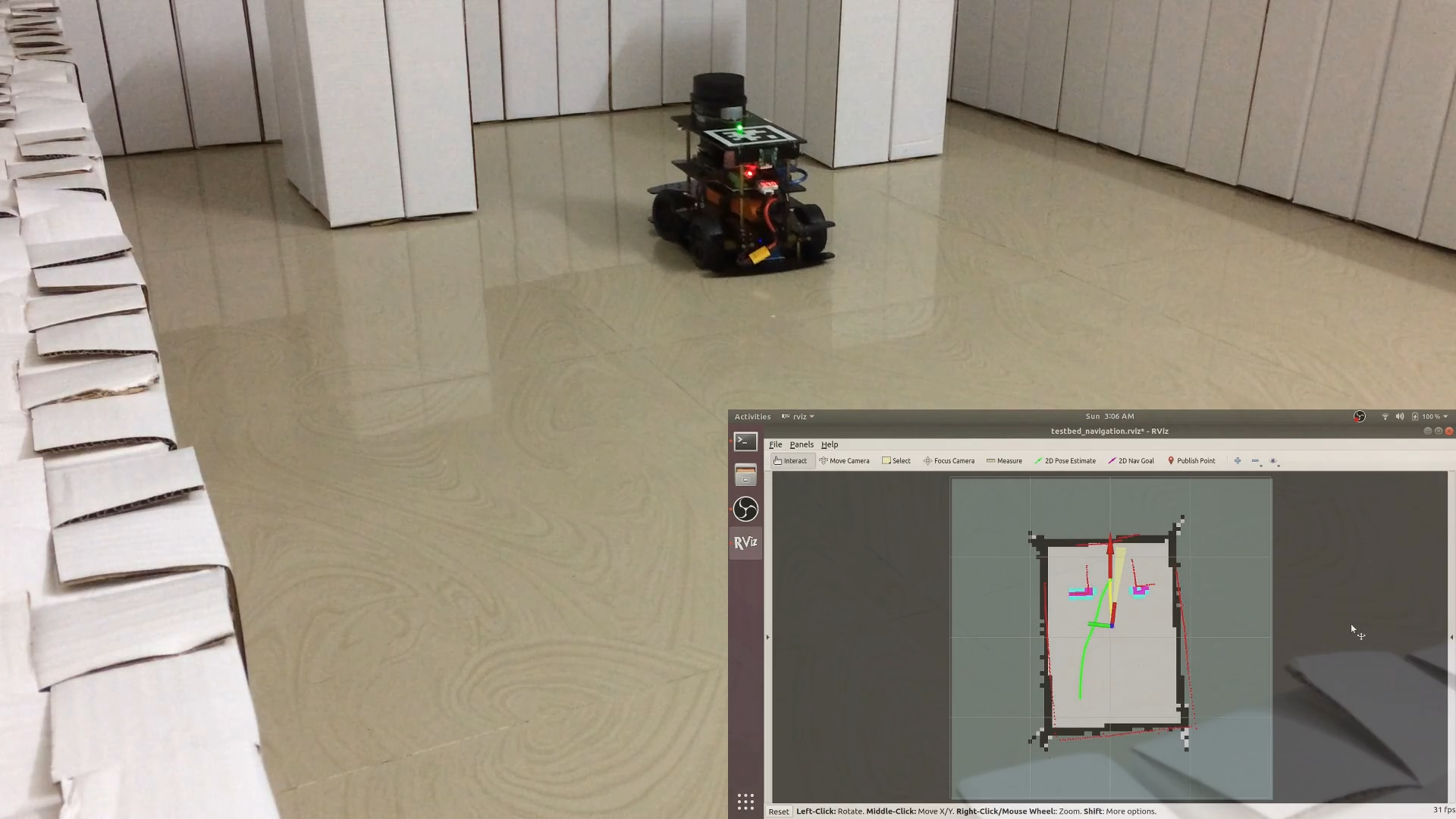
| Autonomous Parking | Behavioural Cloning |
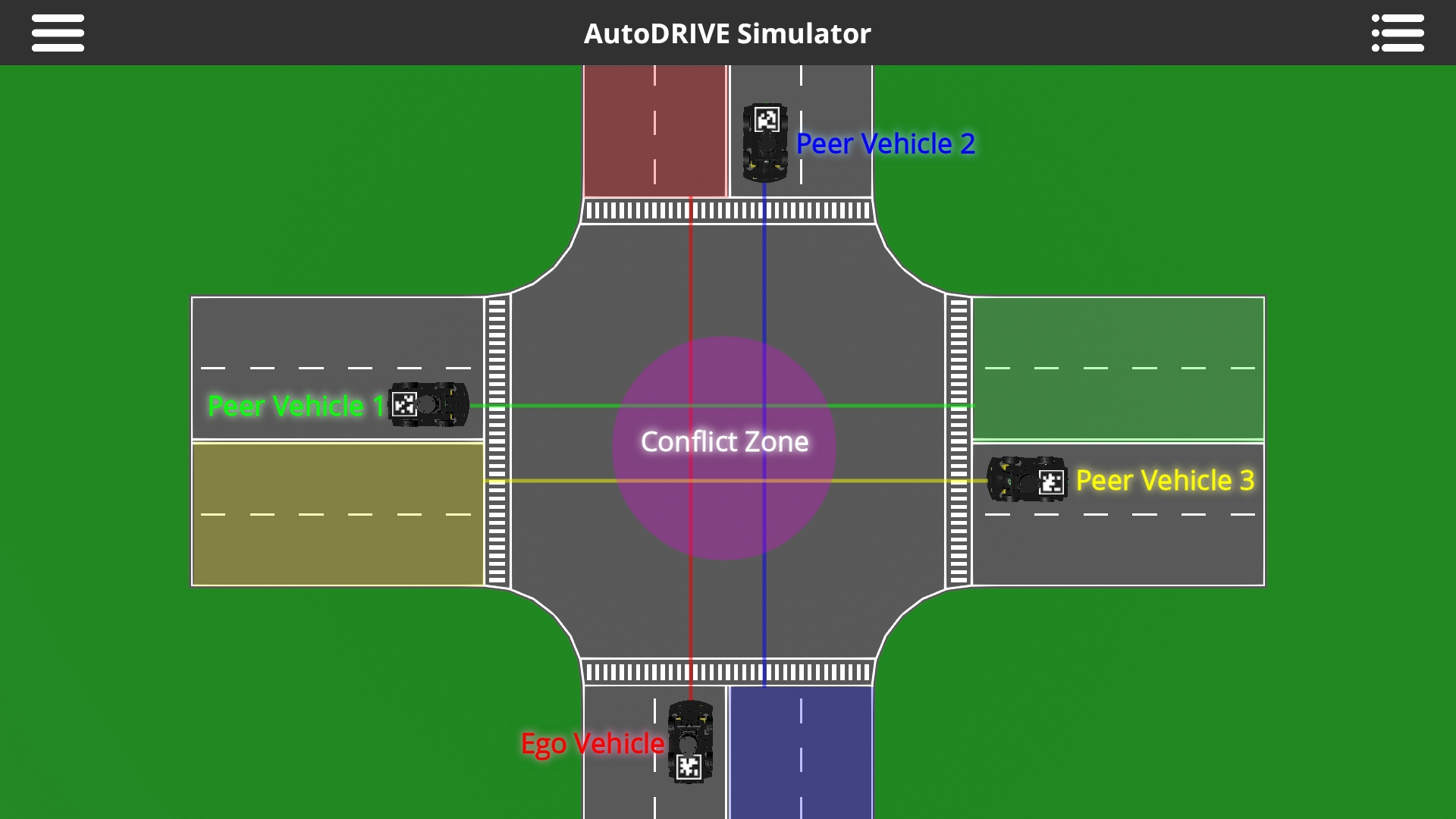 |
 |
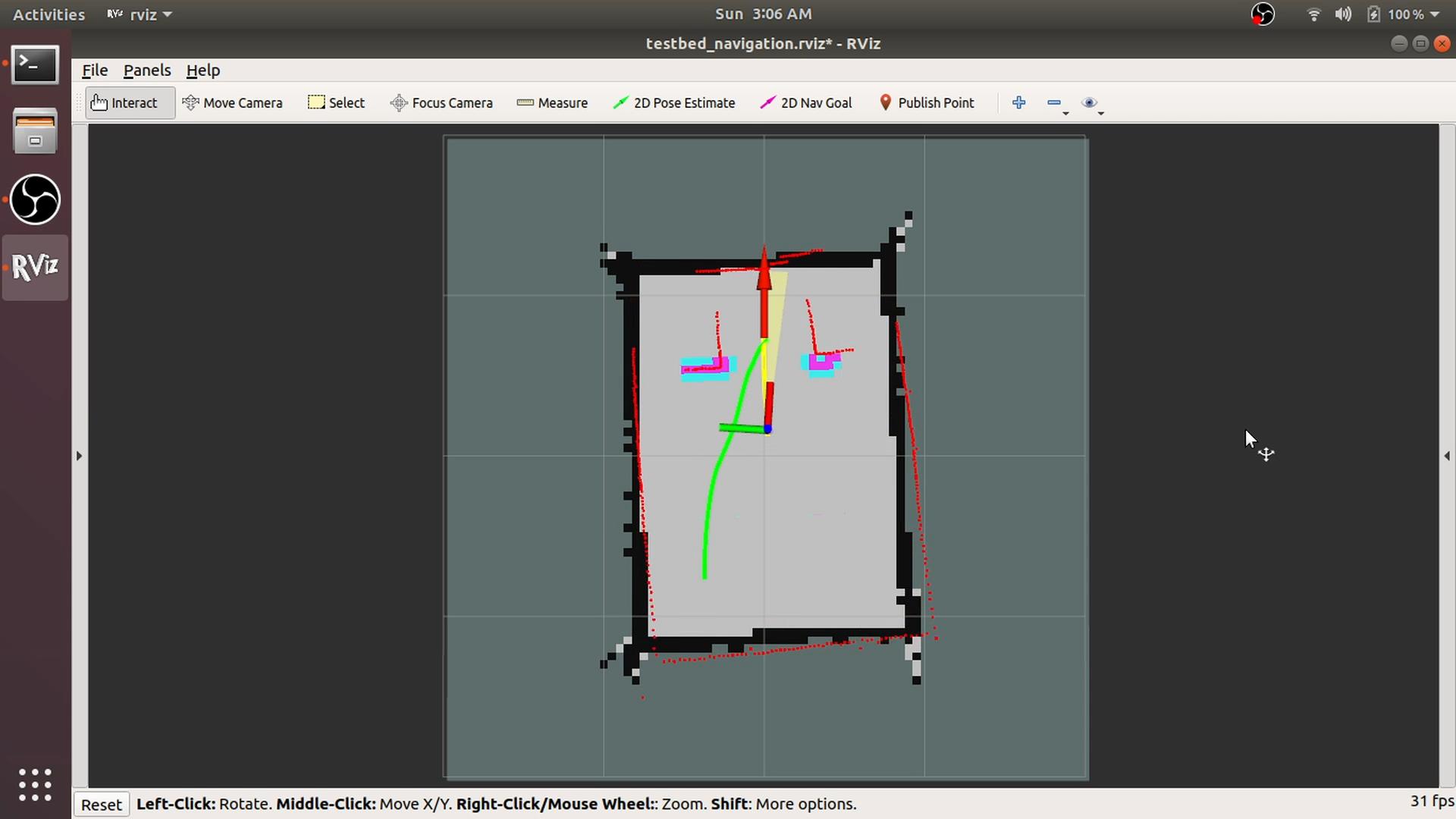
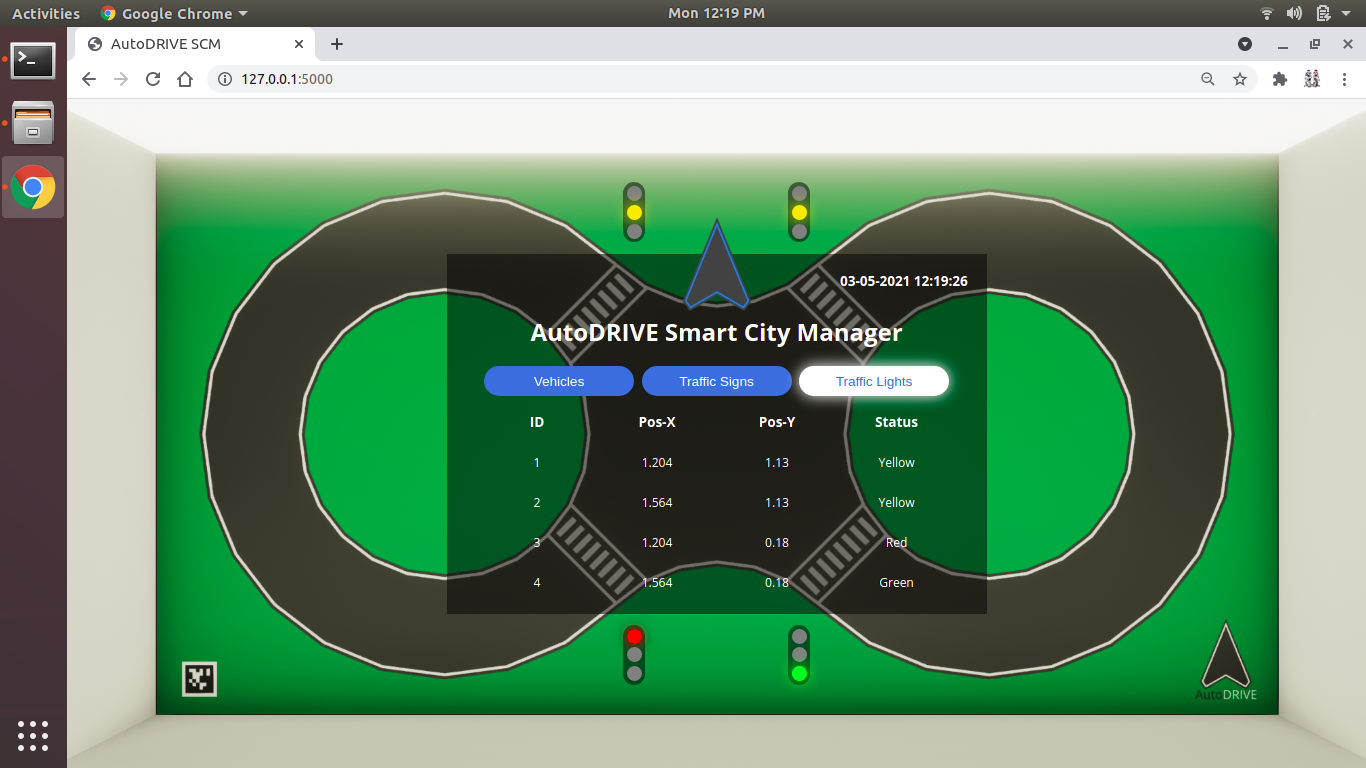
| Intersection Traversal | Smart City Management |
Presentations¶
We encourage you to take a look at the following presentations to gain a better insight into the AutoDRIVE Ecosystem.


Team¶
Developers¶
 |
 |
| Tanmay Vilas Samak | Chinmay Vilas Samak |
Contributors¶
 |
 |
 |
 |
| Rohit Ravikumar | Parth Shinde | Joey Binz | Giovanni Martino |
Mentors¶
 |
 |
 |
| Dr. Venkat Krovi | Dr. Sivanathan Kandhasamy | Dr. Ming Xie |
Institutions¶
 |
 |
 |
| CU-ICAR | SRM-IST | NTU |